Works
WORKS
フィジカルAI・ロボティクス領域を中心に、様々なプロジェクトに携わっています
サービス
業種
フィジカルAI
建設・インフラ
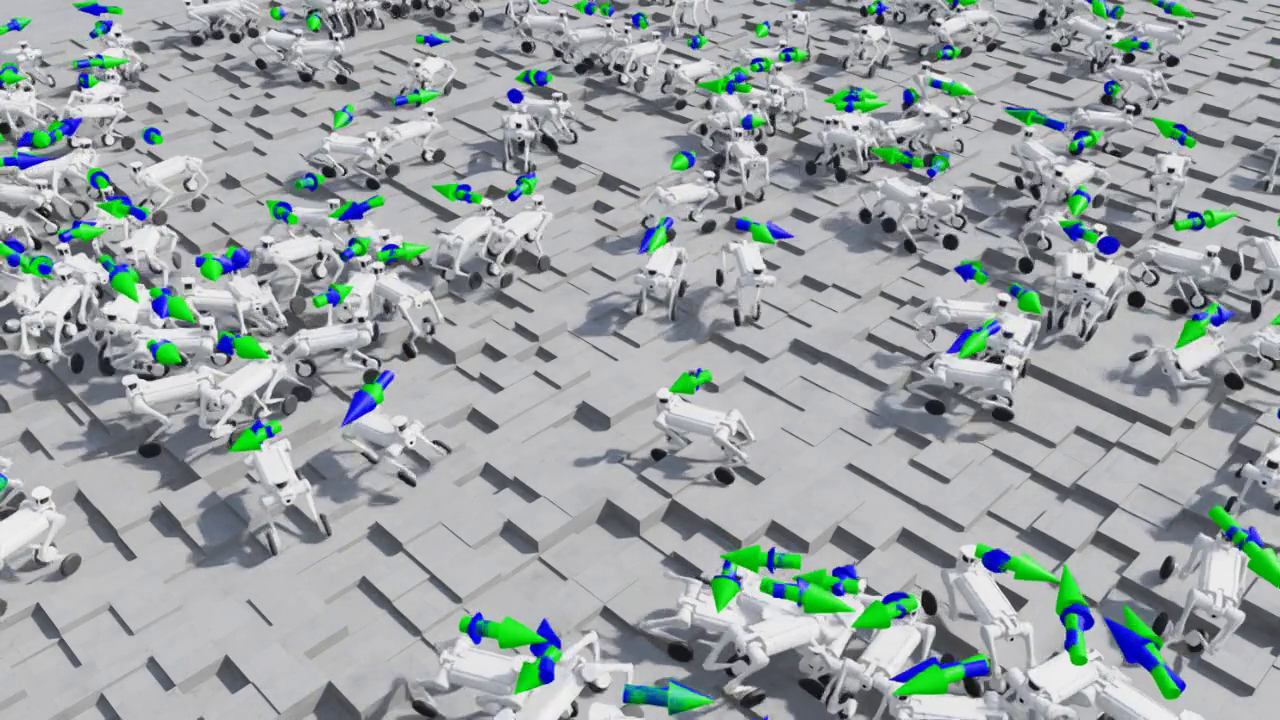
四脚ロボット 不整地歩行ポリシー開発
Unitree B2-W(車輪付き四脚ロボット)はメーカー提供の歩行ポリシーでは不整地に対応できません。本プロジェクトでは、NVIDIA Isaac Sim上で強化学習(PPO)を用いて不整地歩行ポリシーを新たに学習。2,048並列環境でのカリキュラム学習により、階段・坂道・凹凸地形を自律走破する16自由度の制御ポリシーを獲得しました。
Isaac SimIsaac LabPPO16DOFUnitree B2-WSim-to-Real
フィジカルAI
建設・インフラ
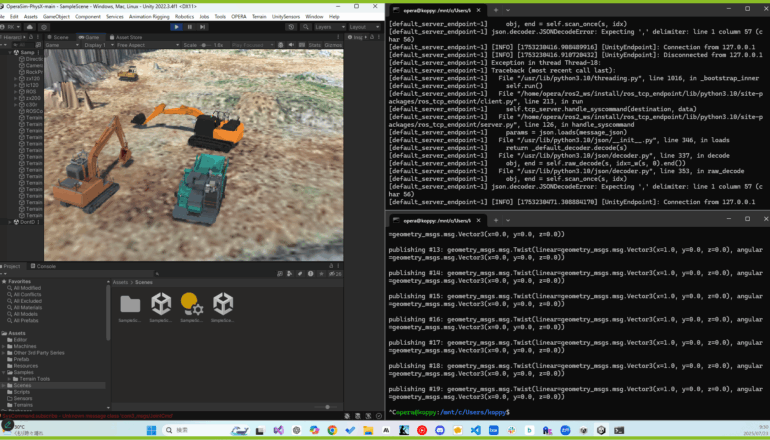
自律施工技術開発基盤「OPERA」技術評価
土木研究所が開発した自律施工技術開発基盤「OPERA」を活用した技術評価。Unityの3Dシミュレータ上で、ROS2を用いて油圧ショベルを自律的に動作させるシステムの検証を実施。
ROS2Unity自律制御建設機械
フィジカルAI
製造業
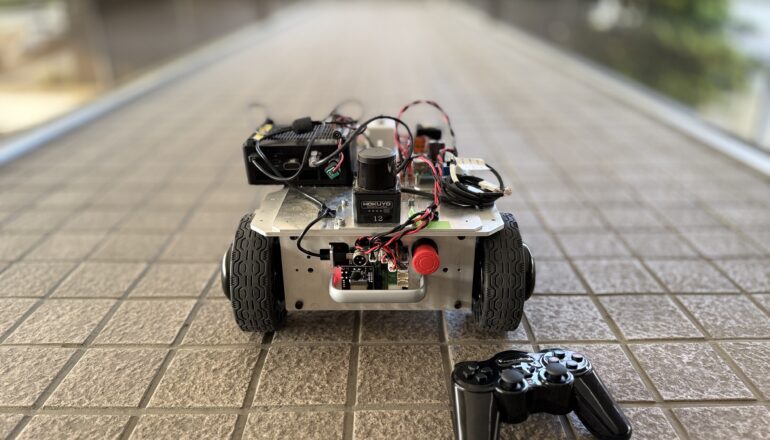
IMUによる自己位置推定精度向上検証
屋内移動ロボットにおける自己位置の正確さについて、IMU(動きや傾きを測るセンサ)の有無でどれほど違いが出るのかを比較検証。メガローバーを使用したSLAM精度向上の実証実験。
ROS2SLAMIMUメガローバー
フィジカルAI
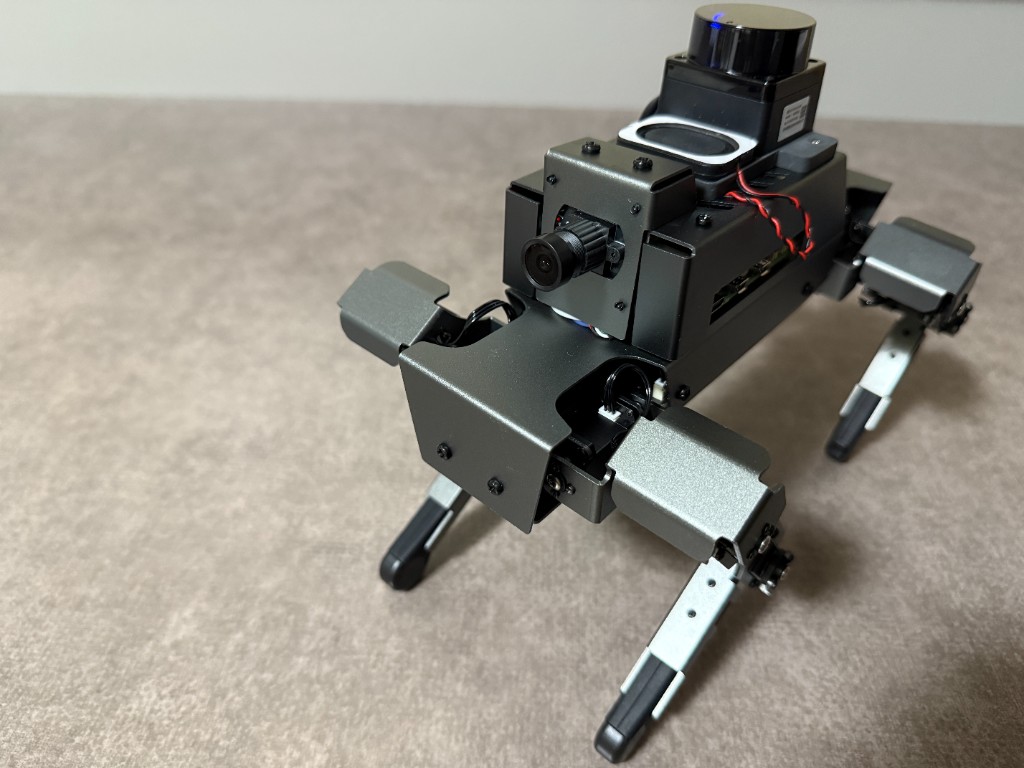
ROS2開発 dogzilla S2 初期動作検証
四足歩行ロボット dogzilla S2 の組立から初期動作検証まで実施。SLAM/ナビゲーション機能の開発に向けた技術基盤を構築。
ROS2四足歩行ロボットSLAMナビゲーション