屋内移動ロボットにおける自己位置の正確さについて、IMU(動きや傾きを測るセンサ)の有無でどれほど違いが出るのかを比較検証。メガローバーを使用したSLAM精度向上の実証実験。
プロジェクト概要
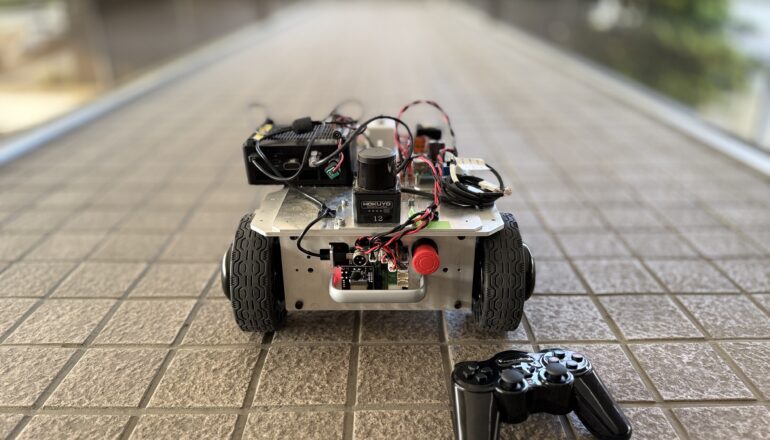
屋内移動ロボットにおける自己位置推定の精度について、IMU(慣性計測装置)の有無による比較検証を実施しました。
実験内容
成果
IMUを併用することで、特にロボットの回転動作時における位置推定の精度が向上することを確認しました。
屋内移動ロボットにおける自己位置の正確さについて、IMU(動きや傾きを測るセンサ)の有無でどれほど違いが出るのかを比較検証。メガローバーを使用したSLAM精度向上の実証実験。
屋内移動ロボットにおける自己位置推定の精度について、IMU(慣性計測装置)の有無による比較検証を実施しました。
IMUを併用することで、特にロボットの回転動作時における位置推定の精度が向上することを確認しました。
AI Concierge
Powered by TEAM Z AI