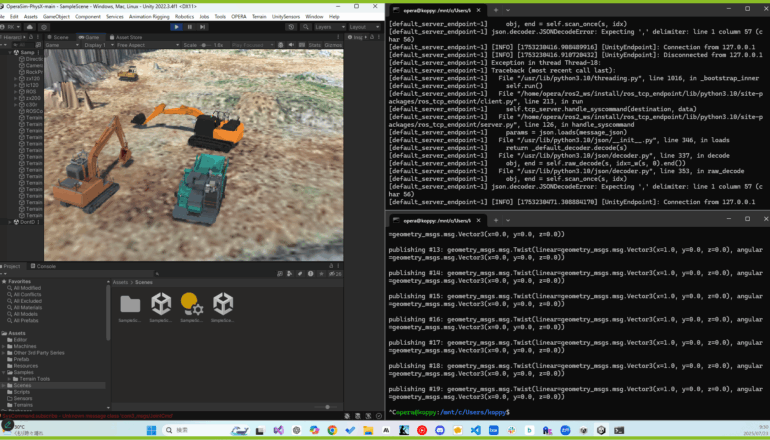
土木研究所が開発した自律施工技術開発基盤「OPERA」を活用した技術評価。Unityの3Dシミュレータ上で、ROS2を用いて油圧ショベルを自律的に動作させるシステムの検証を実施。
プロジェクト概要
土木研究所が開発した自律施工技術開発基盤「OPERA」を活用し、ROS2による油圧ショベルの自律制御システムの技術評価を実施しました。
技術的なポイント
成果
シミュレーション環境上で油圧ショベルが自律的に動作することを確認し、ROS2ベースの制御アーキテクチャの有効性を実証しました。
土木研究所が開発した自律施工技術開発基盤「OPERA」を活用した技術評価。Unityの3Dシミュレータ上で、ROS2を用いて油圧ショベルを自律的に動作させるシステムの検証を実施。
土木研究所が開発した自律施工技術開発基盤「OPERA」を活用し、ROS2による油圧ショベルの自律制御システムの技術評価を実施しました。
シミュレーション環境上で油圧ショベルが自律的に動作することを確認し、ROS2ベースの制御アーキテクチャの有効性を実証しました。
AI Concierge
Powered by TEAM Z AI