四足歩行ロボット dogzilla S2 の組立から初期動作検証まで実施。SLAM/ナビゲーション機能の開発に向けた技術基盤を構築。
プロジェクト概要
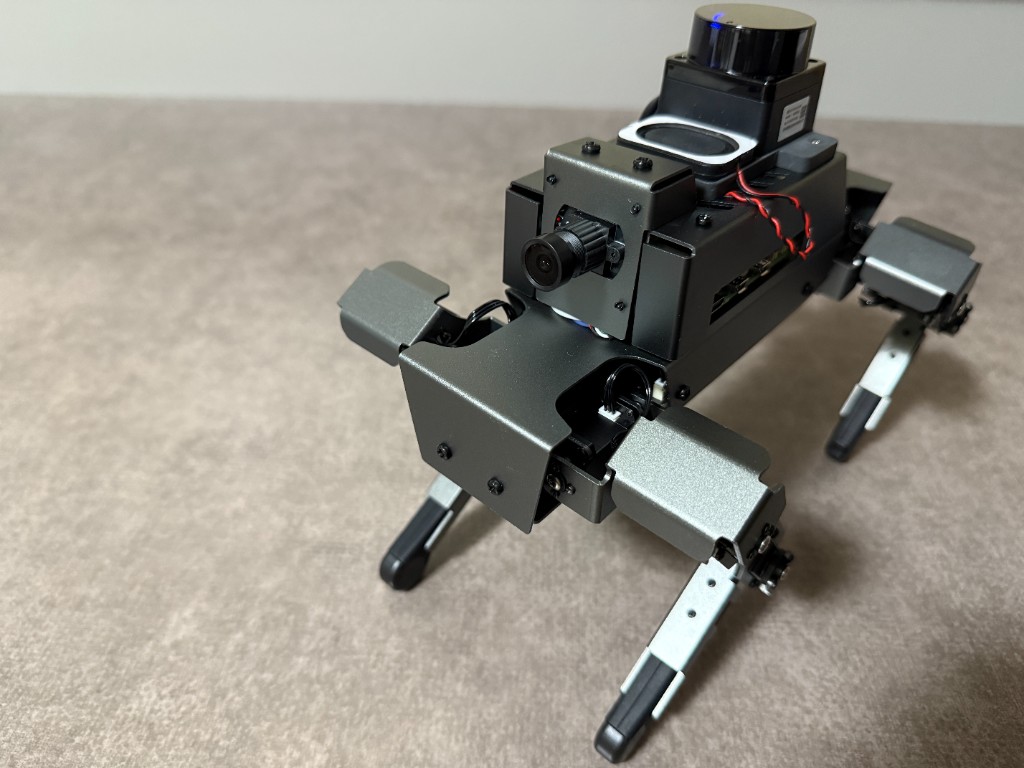
四足歩行ロボット dogzilla S2 を導入し、ROS2環境での制御開発に向けた初期動作検証を実施しました。
作業内容
今後の展望
SLAM/ナビゲーション機能の統合や、不整地での歩行安定性検証を進めていきます。
四足歩行ロボット dogzilla S2 の組立から初期動作検証まで実施。SLAM/ナビゲーション機能の開発に向けた技術基盤を構築。
四足歩行ロボット dogzilla S2 を導入し、ROS2環境での制御開発に向けた初期動作検証を実施しました。
SLAM/ナビゲーション機能の統合や、不整地での歩行安定性検証を進めていきます。
AI Concierge
Powered by TEAM Z AI