WE'LL BE
YOUR
TEAM

TECHNOLOGY
要素技術
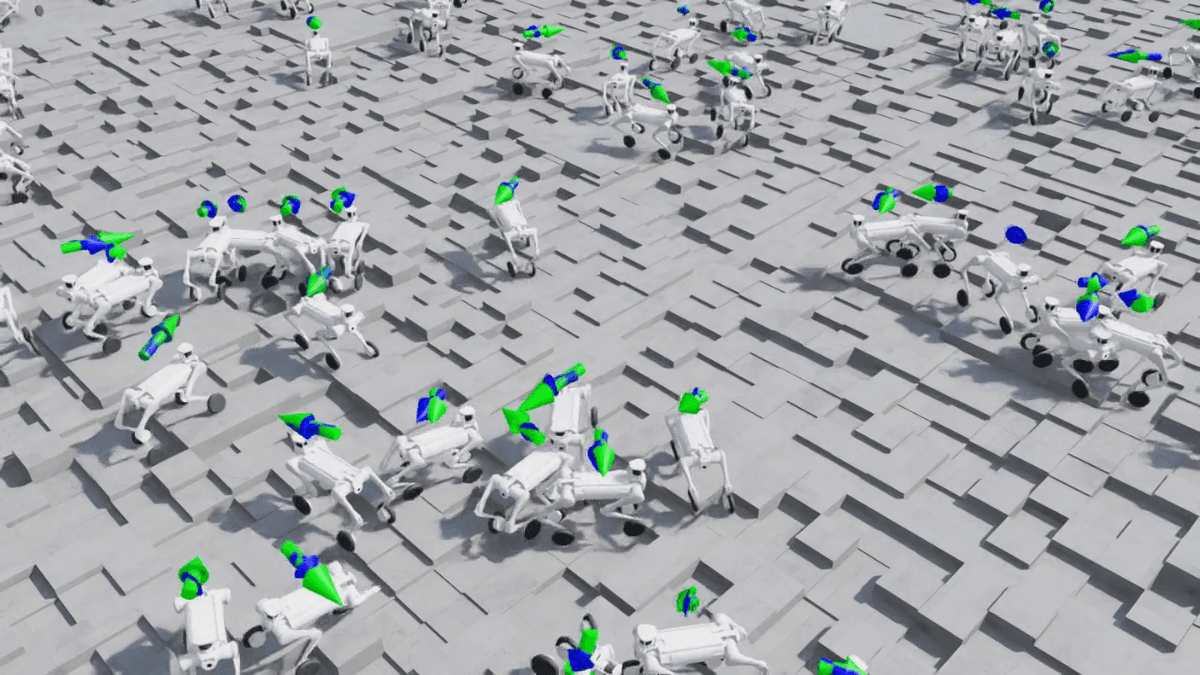
四脚ロボット 不整地歩行ポリシー
シミュレーション環境で強化学習(PPO)を用いて、段差や傾斜にも適応する四脚ロボットの歩行ポリシーを開発。16自由度の制御を実現。
ヒューマノイド 仮想SLAM & Nav
LiDARベースのSLAM技術とROS2 Nav2を組み合わせ、ヒューマノイドロボットの自律移動を仮想環境で開発・検証。実機デプロイまで対応。
ロボットアーム VLA制御
テレオペによるデータ収集から、GR00T / ACTモデル学習、実機推論まで。自然言語指示でロボットアームを制御するVLAパイプラインを構築。
模倣学習パイプライン
人間のデモンストレーションからロボットの動作を学習。少数のデモデータからGR00T Mimicで合成軌道を自動拡張し、効率的にポリシーを構築。
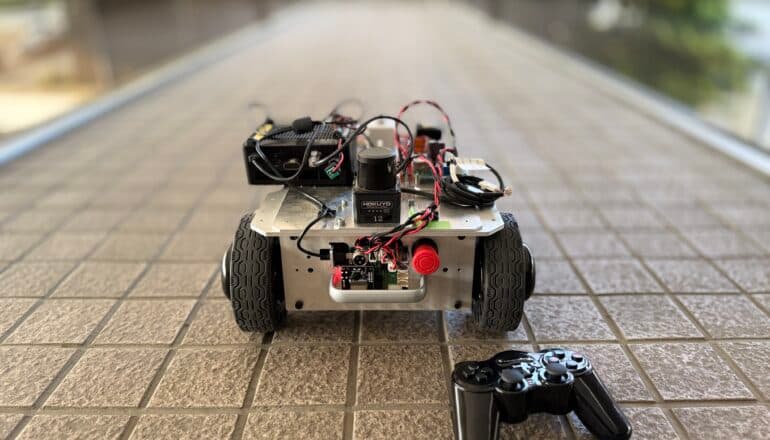
自律移動ナビゲーション
LiDARとROS2を用いた自律移動ロボットのSLAM・ナビゲーションシステム。屋内外の複雑な環境でのリアルタイム経路計画と障害物回避を実現。
ABOUT US
私たちについて
テクノロジーで
人々の挑戦を支え、
世界に可能性を宿す
私たちは「テクノロジーで人々の挑戦を支え、世界に可能性を宿す」という経営理念のもと、お客様の挑戦を共にするパートナーとして、お客様と共に考え共につくる共創の力で付加価値を創出します。
WHY TEAM Z
選ばれる理由
最短1ヶ月のPoCからスタート
大規模な初期投資は不要。まずは小さく試してから、本格開発に進めます。Isaac Sim上での検証で、実機なしでも技術検証が可能です。
チームに入り込むスタイル
外注ではなく「チームの一員」として参画。Slack・GitHubでリアルタイムに連携し、お客様の開発チームと一体になって進めます。
シミュレーションから実機まで一貫
Isaac SimでのRL学習、ROS2でのSLAM/Nav構築、実機テストまでワンストップ。工程間の引き継ぎロスがありません。
CONTACT
お問い合わせ
まずは30分の無料ヒアリングから
「こんなロボットを動かしたい」「まずはシミュレーションで検証したい」など、お気軽にご相談ください。
技術的な実現可能性や概算費用感をお伝えします。