WE'LL BE
YOUR
TEAM
フィジカルAIから、
AIインテグレーションまで。
チームの一員として支援。
physical_ai_controller.py
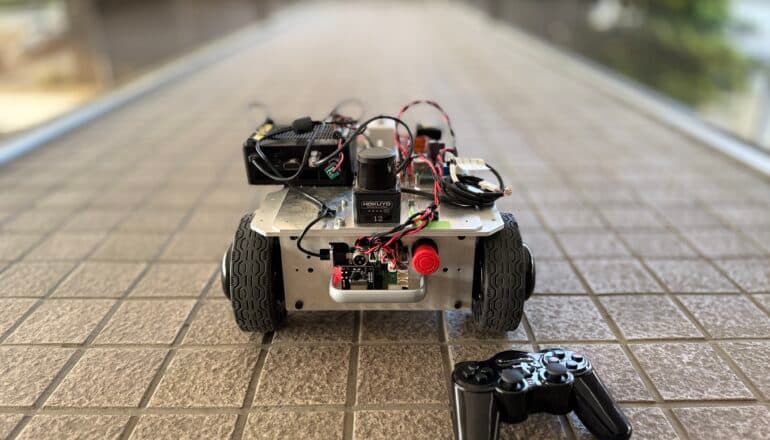
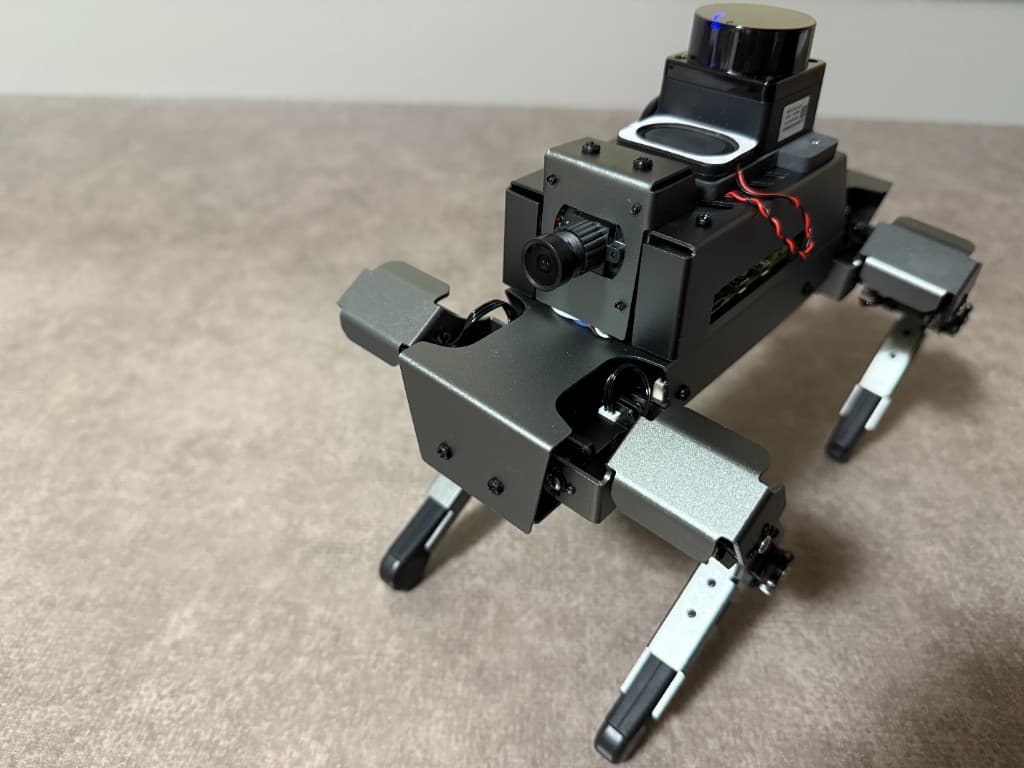
フィジカルAI
ROS2 / Isaac Sim
SES
Python / React
AIインテグレーション
LLM / CV / ML
SERVICES
事業内容

SERVICE 01
フィジカルAI・ROS2開発
Physical AI / Robotics
ROS2を活用した自律移動ロボット・ヒューマノイドの制御開発。NVIDIA Isaac SimやLeRobotを用いた強化学習にも対応。
ROS2Isaac SimLeRobot
詳しく見る
SERVICE 02
SES(技術支援サービス)
System Engineering Service
確かな技術力と次世代技術への対応力。プロジェクトを成功へ導く「真のチームの一員」として深くコミットします。
Python / C#ReactAzure
詳しく見る
SERVICE 03
AIインテグレーション
AI Integration
生成AI・画像認識・自然言語処理など、最新AI技術をお客様の業務に確実にフィットさせるシステム開発を受託します。
LLM / 生成AI画像認識Python
詳しく見る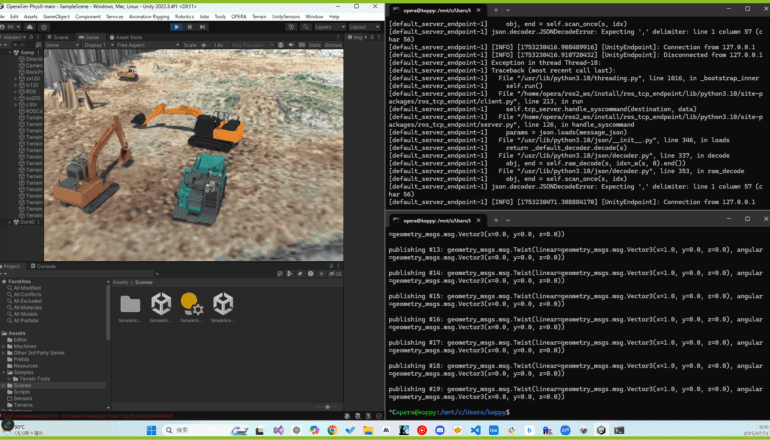
ABOUT US
私たちについて
テクノロジーで
人々の挑戦を支え、
世界に可能性を宿す
私たちは「テクノロジーで人々の挑戦を支え、世界に可能性を宿す」という経営理念のもと、お客様の挑戦を共にするパートナーとして、最新技術と創造力で付加価値を創出します。
挑戦を共にする創造で価値を生む協働でチームに情熱をもって
会社概要を見る
CONTACT
お問い合わせ
フィジカルAI・SES・AIインテグレーションのことなら、チームゼットにおまかせください。
ロボティクス開発、エンジニア派遣、AI活用システム開発についてのご依頼など、まずはお気軽にお問い合わせください。